Para conectar el autómata CQM1H con la programadora es necesario añadir al primero una tarjeta de comunicación extra, la CQM1H-SCB41, la cual añade dos puertos adicionales que se pueden utilizar para conectar ordenadores, terminales programables, dispositivos serie externos o dispositivos de programación distintos a la consola.
Procedimiento
- Lo primero que debemos hacer, una vez abierto CX-Programmer, es crear el primer PLC, al que denominaremos "Maestro". El tipo de dispositivo que vamos a utilizar es el CQM1H. Debemos asegurarnos de que el Tipo de Red es SYSMAC WAY.


- Dentro de la Configuración de tipo de dispositivo debemos seleccionar como Tipo de CPU la CPU51.

- Nos aparecerá la siguiente pantalla. Es cuando debemos crear el segundo PLC, que actuará como Esclavo. Para ello pulsamos con el botón derecho sobre el proyecto y pulsamos Insertar PLC... Después deberemos configurarlo tal y como hemos hecho con el PLC Maestro en los dos pasos anteriores.



- Una vez tengamos definidos los dos automatas debemos configurar cada uno de ellos. El primero lo configuraremos como Maestro, pulsando en Configuración, en la pestaña Tarjeta de comun. A y seleccionando el Modo PC Link unidireccional (abajo).

- El segundo lo configuraremos como Esclavo, haciendo lo mismo que en el PLC Maestro, pulsando en Configuración, en la pestaña Tarjeta de comun. A, pero seleccionando en este caso el Modo PC Link unidireccional (arriba).



************************************
Área de datos LR
La comunicación se realizará a través del área de datos LR. Este área se emplea para poder mandar y recibir datos.En el CMP1A, el área LR va desde el canal LR00 hasta el LR15, empleándose los canales para escribir desde el maestro hasta el esclavo, (LR00 a LR07) y los siguientes (LR08 a LR15) para escribir desde el esclavo al maestro.
.jpg) En el PLC que vamos a emplear nosotros, el CQM1H, podemos transmitir 64 canales. El área LR va desde el canal LR00 hasta el LR63, empleándose los canales para escribir desde el maestro hasta el esclavo, (LR00 a LR31) y los siguientes (LR32 a LR63) para escribir desde el esclavo al maestro.
En el PLC que vamos a emplear nosotros, el CQM1H, podemos transmitir 64 canales. El área LR va desde el canal LR00 hasta el LR63, empleándose los canales para escribir desde el maestro hasta el esclavo, (LR00 a LR31) y los siguientes (LR32 a LR63) para escribir desde el esclavo al maestro.
El área de enlace será siempre LR00 a LR15 (16 canales) para comunicaciones Data Link 1:1 con CPM1A., con lo cual tendríamos que modificar el tamaño del área de comunicaciones en el CQM1H para adaptarlo al CPM1A.
Por último, deberemos cambiar el conmutador del modo de comunicaciones en el CIF01 del CPM1A y pasar de Host Link a NT Link.
Por último, deberemos cambiar el conmutador del modo de comunicaciones en el CIF01 del CPM1A y pasar de Host Link a NT Link.
************************************
- Este es el código de programación del primer PLC, el que actúa como Maestro:

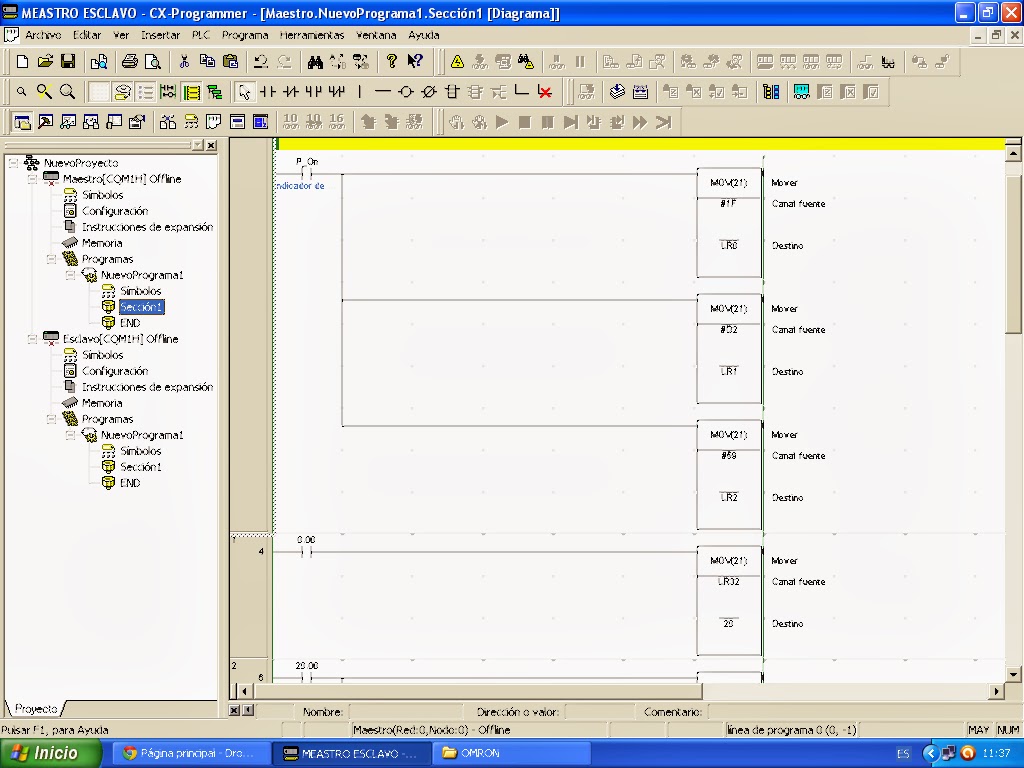
- Los datos introducidos en la instruccion MOV deben ser de tipo hexadecimal. Por tanto el 31 será el #1F, el 210 será el #D2, y el 89 será el #59.
- P_On es un bit que estará siempre activo.
- El valor introducido en el temporizador TIM no es #5 como está en la imagen, sino #50, para establecer los 5 segundos requeridos en el enunciado.

.jpg) Es el momento de comprobar si ambos PLC´s se comunican, y transmiten los datos correspondientes de forma correcta. Si existe comunicación entre los autómatas deberá parpadear en ambos el LED Comm1, y para comprobar que los datos son correctos comprobaremos los LEDs de salidas. Todo esto se localiza en el panel indicado en la imagen con la flecha roja.
Es el momento de comprobar si ambos PLC´s se comunican, y transmiten los datos correspondientes de forma correcta. Si existe comunicación entre los autómatas deberá parpadear en ambos el LED Comm1, y para comprobar que los datos son correctos comprobaremos los LEDs de salidas. Todo esto se localiza en el panel indicado en la imagen con la flecha roja.

- Este es el código de programación del segundo PLC, el que actúa como Esclavo:

- Cuando vayamos a cargar los programas a debemos asegurarnos que la barra de herramientas tenga las siguientes opciones activadas. Una vez las tengamos marcadas ya podemos transferir los datos a un PLC pulsando el botón remarcado en rojo.


Nos aparecerá la siguiente pantalla, en la que debemos desmarcar la opción Funciones de expansión, y marcar la opción Configuración. Pulsando en Aceptar transferimos el programa.

- Una vez cargado el programa en el autómata 1, deberemos repetir el paso anterior con el otro PLC.
.jpg) Es el momento de comprobar si ambos PLC´s se comunican, y transmiten los datos correspondientes de forma correcta. Si existe comunicación entre los autómatas deberá parpadear en ambos el LED Comm1, y para comprobar que los datos son correctos comprobaremos los LEDs de salidas. Todo esto se localiza en el panel indicado en la imagen con la flecha roja.
Es el momento de comprobar si ambos PLC´s se comunican, y transmiten los datos correspondientes de forma correcta. Si existe comunicación entre los autómatas deberá parpadear en ambos el LED Comm1, y para comprobar que los datos son correctos comprobaremos los LEDs de salidas. Todo esto se localiza en el panel indicado en la imagen con la flecha roja.












.jpg)


.jpg)

