CPM1A y un módulo MURR de 8 entradas digitales.
El sistema tendrá que realizar las siguientes actuaciones:
1. Programar un circuito marcha-paro para el funcionamiento de un motor:
Módulo de entradas MURR
- E0 : Pulsador de paro.
- E1: Pulsador de marcha.
Autómata Omron:
- 10.04: Motor
2. Transferir información del Siemens al Omron:
Al pulsar la entrada E3 del módulo de entradas se transferirán los bytes de marcas 10 y 11 del Siemens, al autómata Omron (evidentemente, estos bytes tendrán un contenido). La información se almacenará en el canal 20 del Omron.

Para interconectar los dispositivos mediante Profibus es necesario que estos dispongan de puerto Profibus. El módulo MURR lo lleva integrado, pero en los autómatas será necesario acoplar ciertos módulos,
- en la CPU314IFM el CP342-5
- y en el CPM1A el PRT21.
Este es el proceso de comunicación:

Estas son las direcciones de memoria utilizadas:

Agregar Hardware como esclavo:
Ya sabemos configurar el PLC como maestro y como instalar los drivers de dispositivos de marcas diferentes a Siemens (archivos .gsd), por tanto vamos a agregar directamente los esclavos. Para ello tan solo debemos seleccionarlo en la librería y arrastrarlo a la barra negra con franjas blancas:
El OMRON CPM1A lo seleccionaremos así:

El módulo MURR lo seleccionaremos así, eligiendo el de 8 entradas digitales (DI8):

La pantalla de configuración de Hardware quedará asi:

La cantidad de Bytes utilizados por el CPM1A (dirección 3):

La cantidad de Bytes utilizados por el MURR (dirección 4):


Para establecer la dirección Profibus de ambos dispositivos deberemos configurar los switches (x1 y x10) de la misma manera que lo hicimos en la práctica anterior:
- CPM1A: el 3 en x1 y 0 en x10 ya que la dirección Profibus asignada será la 3.
- MURR: el 4 en x1 y 0 en x10 ya que la dirección Profibus asignada será la 4.
Programa KOP en autómata SIEMENS (maestro):
Descripción de la función de envío de datos desde el Maestro a los Esclavos:
- CPLADDR: Indicamos con un número hexadecimal la dirección donde comienza el envío y recepción en nuestra red CP342-5. En nuestro caso es el 100, que equivale a la dirección 4.
- SEND: Indicamos el puntero o bit desde el cual comenzaremos a enviar información, y el número de bytes que vamos a enviar (2 bytes).
- El resto, de momento, no son necesarios.

Descripción de la función de recepción de datos desde los Esclavos al Maestro:

- CPLADDR: Indicamos con un número hexadecimal la dirección donde comienza el envío y recepción en nuestra red CP342-5. En nuestro caso es el 100, que equivale a la dirección 4.
- SEND: Indicamos el puntero o bit desde el cual comenzaremos a enviar información, y el número de bytes que vamos a recibir (3 bytes).
- El resto, de momento, no son necesarios.
Resto de programa KOP

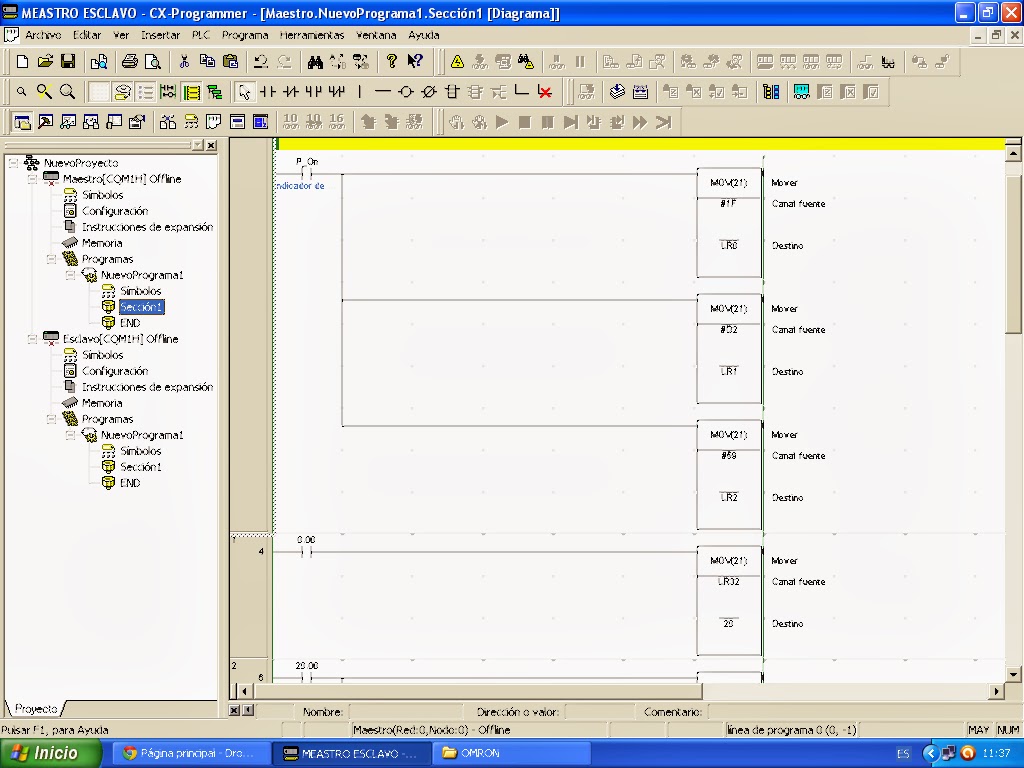
Programa KOP en autómata OMRON (esclavo):
.bmp)

























.jpg)



.jpg)












{kind=link}